



High-Performance Robotic Motor Solutions
Delivering high-performance robotic motor solutions for precise, reliable, and efficient automation.
Groundbreaking advantages.




Take a closer look.
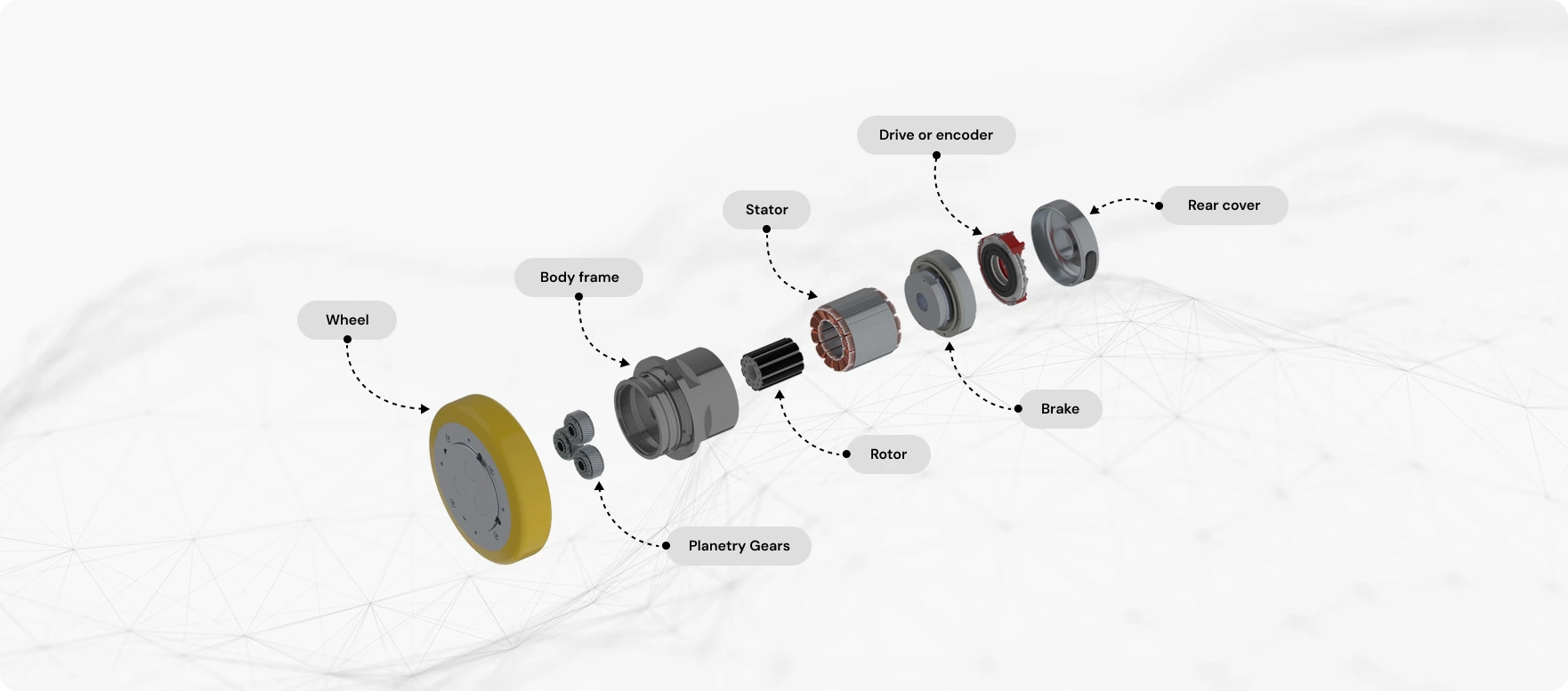
Seamless integration
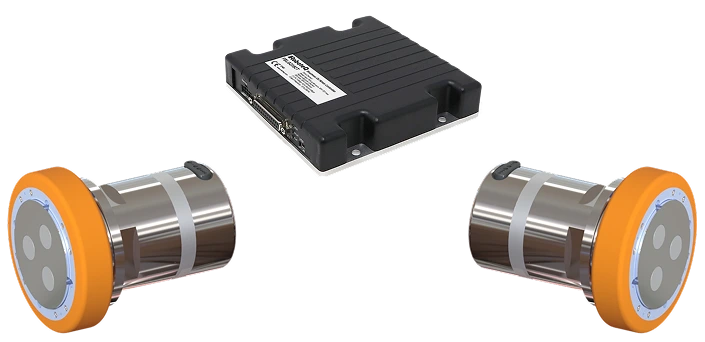
External drive package
2 motors with double incremental encoder
Integrated brakes
External dual channel drive
Cables
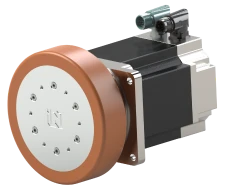
Integrated drives package
2 motors with integrated drive and safety
Integrated brakes
Cables

Explore the lineup.
Compare all models >
iMR 100
Design for smaller and faster sorting robots

Peak Torque
25 Nm

Peak Power
625 W

Power
350 W

Length
80 – 140 mm

Radial Load
1,000 N

iMR 500
No jerk motion, no speed oscillation, straight trajectory
Peak Torque
130 Nm
Peak Power
2,400 W
Power
1,100 W
Length
145 mm
Radial Load
7,500 N
iMR 2000
Designed for bigger machines and heavier payloads
Peak Torque
315 Nm
Peak Power
7,000 W
Power
3,000 W
Length
240 mm
Radial Load
20,000 N
Technical Documentation.
We work closely with robotic companies that are seeking precision and a collaborative approach.
| State | SDO (mailbox communication) | Slave-to-Master PDO (process data communication) | Master-to-Slave PDO (process data communication) |
|---|---|---|---|
| Init | No | No | No |
| Pre-Operational | Yes | No | No |
| Safe-Operational | Yes | Yes | No |
| Operational | Yes | Yes | Yes |
| Bootstrap | File access over EtherCAT (FoE) only | No | No |